# Copyright 2021 NVIDIA Corporation. All Rights Reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# ==============================================================================
Session-based Recommendation with XLNET
In this notebook we introduce the Transformers4Rec library for sequential and session-based recommendation. This notebook uses the PyTorch API, but a TensorFlow API is also available. Transformers4Rec integrates with the popular HuggingFace’s Transformers and make it possible to experiment with cutting-edge implementation of the latest NLP Transformer architectures.
We demonstrate how to build a session-based recommendation model with the XLNET Transformer architecture. The XLNet architecture was designed to leverage the best of both auto-regressive language modeling and auto-encoding with its Permutation Language Modeling training method. In this example we will use XLNET with masked language modeling (MLM) training method, which showed very promising results in the experiments conducted in our ACM RecSys’21 paper.
In the previous notebook we went through our ETL pipeline with NVTabular library, and created sequential features to be used in training a session-based recommendation model. In this notebook we will learn:
Accelerating data loading of parquet files with multiple features on PyTorch using NVTabular library
Training and evaluating a Transformer-based (XLNET-MLM) session-based recommendation model with multiple features
Build a DL model with Transformers4Rec library
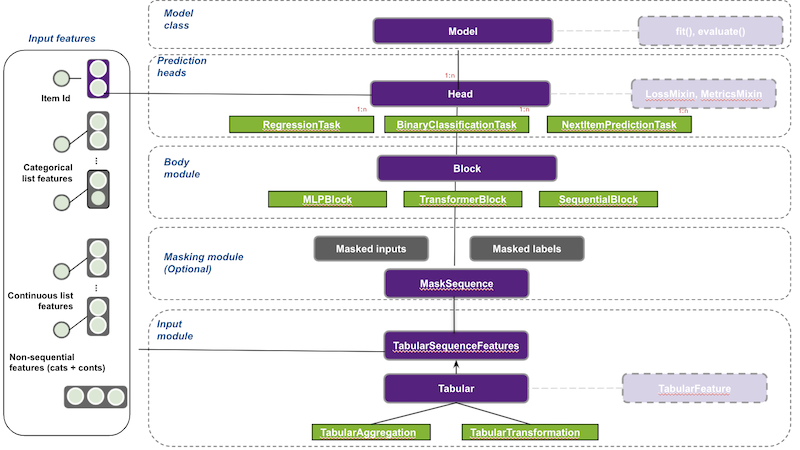
Transformers4Rec supports multiple input features and provides configurable building blocks that can be easily combined for custom architectures:
TabularSequenceFeatures class that reads from schema and creates an input block. This input module combines different types of features (continuous, categorical & text) to a sequence.
MaskSequence to define masking schema and prepare the masked inputs and labels for the selected LM task.
TransformerBlock class that supports HuggingFace Transformers for session-based and sequential-based recommendation models.
SequentialBlock creates the body by mimicking torch.nn.sequential class. It is designed to define our model as a sequence of layers.
Head where we define the prediction task of the model.
NextItemPredictionTask is the class to support next item prediction task.
Trainer extends the
Trainerclass from HF transformers and manages the model training and evaluation.
You can check the full documentation of Transformers4Rec if needed.
Figure 1 illustrates Transformers4Rec meta-architecture and how each module/block interacts with each other.
Imports required libraries
import os
import glob
import torch
from transformers4rec import torch as tr
from transformers4rec.torch.ranking_metric import NDCGAt, AvgPrecisionAt, RecallAt
from transformers4rec.torch.utils.examples_utils import wipe_memory
Transformers4Rec library relies on a schema object to automatically build all necessary layers to represent, normalize and aggregate input features. As you can see below, schema.pb is a protobuf file that contains metadata including statistics about features such as cardinality, min and max values and also tags features based on their characteristics and dtypes (e.g., categorical, continuous, list, integer).
Manually set the schema
from merlin_standard_lib import Schema
SCHEMA_PATH = os.environ.get("INPUT_SCHEMA_PATH", "schema.pb")
schema = Schema().from_proto_text(SCHEMA_PATH)
!cat $SCHEMA_PATH
feature {
name: "session_id"
type: INT
int_domain {
name: "session_id"
min: 1
max: 100001
is_categorical: false
}
annotation {
tag: "groupby_col"
}
}
feature {
name: "category-list_trim"
value_count {
min: 2
max: 20
}
type: INT
int_domain {
name: "category-list_trim"
min: 1
max: 400
is_categorical: true
}
annotation {
tag: "list"
tag: "categorical"
tag: "item"
}
}
feature {
name: "item_id-list_trim"
value_count {
min: 2
max: 20
}
type: INT
int_domain {
name: "item_id/list"
min: 1
max: 50005
is_categorical: true
}
annotation {
tag: "item_id"
tag: "list"
tag: "categorical"
tag: "item"
}
}
feature {
name: "timestamp/age_days-list_trim"
value_count {
min: 2
max: 20
}
type: FLOAT
float_domain {
name: "timestamp/age_days-list_trim"
min: 0.0000003
max: 0.9999999
}
annotation {
tag: "continuous"
tag: "list"
}
}
feature {
name: "timestamp/weekday/sin-list_trim"
value_count {
min: 2
max: 20
}
type: FLOAT
float_domain {
name: "timestamp/weekday-sin_trim"
min: 0.0000003
max: 0.9999999
}
annotation {
tag: "continuous"
tag: "time"
tag: "list"
}
}
# You can select a subset of features for training
schema = schema.select_by_name(['item_id-list_trim',
'category-list_trim',
'timestamp/weekday/sin-list_trim',
'timestamp/age_days-list_trim'])
Define the sequential input module
Below we define our input block using the TabularSequenceFeatures class. The from_schema() method processes the schema and creates the necessary layers to represent features and aggregate them. It keeps only features tagged as categorical and continuous and supports data aggregation methods like concat and elementwise-sum techniques. It also support data augmentation techniques like stochastic swap noise. It outputs an interaction representation after combining all features and also the input mask according to the training task (more on this later).
The max_sequence_length argument defines the maximum sequence length of our sequential input, and if continuous_projection argument is set, all numerical features are concatenated and projected by an MLP block so that continuous features are represented by a vector of size defined by user, which is 64 in this example.
inputs = tr.TabularSequenceFeatures.from_schema(
schema,
max_sequence_length=20,
continuous_projection=64,
d_output=100,
masking="mlm",
)
The output of the TabularSequenceFeatures module is the sequence of interactions embeddings vectors defined in the following steps:
Create sequence inputs: If the schema contains non sequential features, expand each feature to a sequence by repeating the value as many as the
max_sequence_lengthvalue.
Get a representation vector of categorical features: Project each sequential categorical feature using the related embedding table. The resulting tensor is of shape (bs, max_sequence_length, embed_dim).
Project scalar values if
continuous_projectionis set : Apply an MLP layer with hidden size equal tocontinuous_projectionvector size value. The resulting tensor is of shape (batch_size, max_sequence_length, continuous_projection).
Aggregate the list of features vectors to represent each interaction in the sequence with one vector: For example,
concatwill concat all vectors based on the last dimension-1and the resulting tensor will be of shape (batch_size, max_sequence_length, D) where D is the sum over all embedding dimensions and the value of continuous_projection.
If masking schema is set (needed only for the NextItemPredictionTask training), the masked labels are derived from the sequence of raw item-ids and the sequence of interactions embeddings are processed to mask information about the masked positions.
Define the Transformer Block
In the next cell, the whole model is build with a few lines of code. Here is a brief explanation of the main classes:
XLNetConfig - We have injected in the HF transformers config classes like
XLNetConfigthebuild()method, that provides default configuration to Transformer architectures for session-based recommendation. Here we use it to instantiate and configure an XLNET architecture.TransformerBlock class integrates with HF Transformers, which are made available as a sequence processing module for session-based and sequential-based recommendation models.
NextItemPredictionTask supports the next-item prediction task. We also support other predictions tasks, like classification and regression for the whole sequence.
# Define XLNetConfig class and set default parameters for HF XLNet config
transformer_config = tr.XLNetConfig.build(
d_model=64, n_head=4, n_layer=2, total_seq_length=20
)
# Define the model block including: inputs, masking, projection and transformer block.
body = tr.SequentialBlock(
inputs, tr.MLPBlock([64]), tr.TransformerBlock(transformer_config, masking=inputs.masking)
)
# Defines the evaluation top-N metrics and the cut-offs
metrics = [NDCGAt(top_ks=[20, 40], labels_onehot=True),
RecallAt(top_ks=[20, 40], labels_onehot=True)]
# Define a head related to next item prediction task
head = tr.Head(
body,
tr.NextItemPredictionTask(weight_tying=True, hf_format=True,
metrics=metrics),
inputs=inputs,
)
# Get the end-to-end Model class
model = tr.Model(head)
Note that we can easily define an RNN-based model inside the SequentialBlock instead of a Transformer-based model. You can explore this tutorial for a GRU-based model example.
Train the model
We use the NVTabular PyTorch Dataloader for optimized loading of multiple features from input parquet files. You can learn more about this data loader here.
Set Training arguments
from transformers4rec.config.trainer import T4RecTrainingArguments
from transformers4rec.torch import Trainer
# Set hyperparameters for training
train_args = T4RecTrainingArguments(data_loader_engine='nvtabular',
dataloader_drop_last = True,
report_to = [],
gradient_accumulation_steps = 1,
per_device_train_batch_size = 256,
per_device_eval_batch_size = 32,
output_dir = "./tmp",
learning_rate=0.0005,
lr_scheduler_type='cosine',
learning_rate_num_cosine_cycles_by_epoch=1.5,
num_train_epochs=5,
max_sequence_length=20,
no_cuda=False)
Note that we add an argument data_loader_engine='nvtabular' to automatically load the features needed for training using the schema. The default value is nvtabular for optimized GPU-based data-loading. Optionally a PyarrowDataLoader (pyarrow) can also be used as a basic option, but it is slower and works only for small datasets, as the full data is loaded to CPU memory.
Daily Fine-Tuning: Training over a time window
Here we do daily fine-tuning meaning that we use the first day to train and second day to evaluate, then we use the second day data to train the model by resuming from the first step, and evaluate on the third day, so on so forth.
We have extended the HuggingFace transformers Trainer class (PyTorch only) to support evaluation of RecSys metrics. In this example, the evaluation of the session-based recommendation model is performed using traditional Top-N ranking metrics such as Normalized Discounted Cumulative Gain (NDCG@20) and Hit Rate (HR@20). NDCG accounts for rank of the relevant item in the recommendation list and is a more fine-grained metric than HR, which only verifies whether the relevant item is among the top-n items. HR@n is equivalent to Recall@n when there is only one relevant item in the recommendation list.
# Instantiate the T4Rec Trainer, which manages training and evaluation for the PyTorch API
trainer = Trainer(
model=model,
args=train_args,
schema=schema,
compute_metrics=True,
)
Define the output folder of the processed parquet files
OUTPUT_DIR = os.environ.get("OUTPUT_DIR", "/workspace/data/sessions_by_day")
start_time_window_index = 1
final_time_window_index = 7
#Iterating over days of one week
for time_index in range(start_time_window_index, final_time_window_index):
# Set data
time_index_train = time_index
time_index_eval = time_index + 1
train_paths = glob.glob(os.path.join(OUTPUT_DIR, f"{time_index_train}/train.parquet"))
eval_paths = glob.glob(os.path.join(OUTPUT_DIR, f"{time_index_eval}/valid.parquet"))
print(train_paths)
# Train on day related to time_index
print('*'*20)
print("Launch training for day %s are:" %time_index)
print('*'*20 + '\n')
trainer.train_dataset_or_path = train_paths
trainer.reset_lr_scheduler()
trainer.train()
trainer.state.global_step +=1
print('finished')
# Evaluate on the following day
trainer.eval_dataset_or_path = eval_paths
train_metrics = trainer.evaluate(metric_key_prefix='eval')
print('*'*20)
print("Eval results for day %s are:\t" %time_index_eval)
print('\n' + '*'*20 + '\n')
for key in sorted(train_metrics.keys()):
print(" %s = %s" % (key, str(train_metrics[key])))
wipe_memory()
['/workspace/data/sessions_by_day/1/train.parquet']
********************
Launch training for day 1 are:
********************
***** Running training *****
Num examples = 768
Num Epochs = 5
Instantaneous batch size per device = 256
Total train batch size (w. parallel, distributed & accumulation) = 256
Gradient Accumulation steps = 1
Total optimization steps = 15
| Step | Training Loss |
|---|
Training completed. Do not forget to share your model on huggingface.co/models =)
finished
********************
Eval results for day 2 are:
********************
eval/loss = 10.3350191116333
eval/next-item/ndcg_at_20 = 0.011259923689067364
eval/next-item/ndcg_at_40 = 0.011259923689067364
eval/next-item/recall_at_20 = 0.0416666679084301
eval/next-item/recall_at_40 = 0.0416666679084301
eval_runtime = 0.1209
eval_samples_per_second = 794.045
eval_steps_per_second = 24.814
***** Running training *****
Num examples = 768
Num Epochs = 5
Instantaneous batch size per device = 256
Total train batch size (w. parallel, distributed & accumulation) = 256
Gradient Accumulation steps = 1
Total optimization steps = 15
['/workspace/data/sessions_by_day/2/train.parquet']
********************
Launch training for day 2 are:
********************
| Step | Training Loss |
|---|
Training completed. Do not forget to share your model on huggingface.co/models =)
finished
********************
Eval results for day 3 are:
********************
eval/loss = 9.907649040222168
eval/next-item/ndcg_at_20 = 0.07261061668395996
eval/next-item/ndcg_at_40 = 0.09025609493255615
eval/next-item/recall_at_20 = 0.21875
eval/next-item/recall_at_40 = 0.3020833432674408
eval_runtime = 0.1604
eval_samples_per_second = 598.353
eval_steps_per_second = 18.699
***** Running training *****
Num examples = 768
Num Epochs = 5
Instantaneous batch size per device = 256
Total train batch size (w. parallel, distributed & accumulation) = 256
Gradient Accumulation steps = 1
Total optimization steps = 15
['/workspace/data/sessions_by_day/3/train.parquet']
********************
Launch training for day 3 are:
********************
| Step | Training Loss |
|---|
Training completed. Do not forget to share your model on huggingface.co/models =)
finished
********************
Eval results for day 4 are:
********************
eval/loss = 9.442419052124023
eval/next-item/ndcg_at_20 = 0.10495926439762115
eval/next-item/ndcg_at_40 = 0.13046541810035706
eval/next-item/recall_at_20 = 0.3020833432674408
eval/next-item/recall_at_40 = 0.4270833432674408
eval_runtime = 0.1071
eval_samples_per_second = 896.554
eval_steps_per_second = 28.017
***** Running training *****
Num examples = 768
Num Epochs = 5
Instantaneous batch size per device = 256
Total train batch size (w. parallel, distributed & accumulation) = 256
Gradient Accumulation steps = 1
Total optimization steps = 15
['/workspace/data/sessions_by_day/4/train.parquet']
********************
Launch training for day 4 are:
********************
| Step | Training Loss |
|---|
Training completed. Do not forget to share your model on huggingface.co/models =)
finished
********************
Eval results for day 5 are:
********************
eval/loss = 8.860241889953613
eval/next-item/ndcg_at_20 = 0.11112610995769501
eval/next-item/ndcg_at_40 = 0.1652408242225647
eval/next-item/recall_at_20 = 0.3333333432674408
eval/next-item/recall_at_40 = 0.59375
eval_runtime = 0.1023
eval_samples_per_second = 938.1
eval_steps_per_second = 29.316
***** Running training *****
Num examples = 768
Num Epochs = 5
Instantaneous batch size per device = 256
Total train batch size (w. parallel, distributed & accumulation) = 256
Gradient Accumulation steps = 1
Total optimization steps = 15
['/workspace/data/sessions_by_day/5/train.parquet']
********************
Launch training for day 5 are:
********************
| Step | Training Loss |
|---|
Training completed. Do not forget to share your model on huggingface.co/models =)
finished
********************
Eval results for day 6 are:
********************
eval/loss = 8.344633102416992
eval/next-item/ndcg_at_20 = 0.10326863825321198
eval/next-item/ndcg_at_40 = 0.17447516322135925
eval/next-item/recall_at_20 = 0.2395833432674408
eval/next-item/recall_at_40 = 0.59375
eval_runtime = 0.1037
eval_samples_per_second = 925.533
eval_steps_per_second = 28.923
***** Running training *****
Num examples = 768
Num Epochs = 5
Instantaneous batch size per device = 256
Total train batch size (w. parallel, distributed & accumulation) = 256
Gradient Accumulation steps = 1
Total optimization steps = 15
['/workspace/data/sessions_by_day/6/train.parquet']
********************
Launch training for day 6 are:
********************
| Step | Training Loss |
|---|
Training completed. Do not forget to share your model on huggingface.co/models =)
finished
********************
Eval results for day 7 are:
********************
eval/loss = 7.80819845199585
eval/next-item/ndcg_at_20 = 0.15623269975185394
eval/next-item/ndcg_at_40 = 0.1892910897731781
eval/next-item/recall_at_20 = 0.3854166865348816
eval/next-item/recall_at_40 = 0.5520833730697632
eval_runtime = 0.101
eval_samples_per_second = 950.741
eval_steps_per_second = 29.711
Saves the model
trainer._save_model_and_checkpoint(save_model_class=True)
Saving model checkpoint to ./tmp/checkpoint-16
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Reloads the model
trainer.load_model_trainer_states_from_checkpoint('./tmp/checkpoint-%s'%trainer.state.global_step)
Re-compute eval metrics of validation data
eval_data_paths = glob.glob(os.path.join(OUTPUT_DIR, f"{time_index_eval}/valid.parquet"))
# set new data from day 7
eval_metrics = trainer.evaluate(eval_dataset=eval_data_paths, metric_key_prefix='eval')
for key in sorted(eval_metrics.keys()):
print(" %s = %s" % (key, str(eval_metrics[key])))
eval/loss = 7.80819845199585
eval/next-item/ndcg_at_20 = 0.15623269975185394
eval/next-item/ndcg_at_40 = 0.1892910897731781
eval/next-item/recall_at_20 = 0.3854166865348816
eval/next-item/recall_at_40 = 0.5520833730697632
eval_runtime = 0.1228
eval_samples_per_second = 781.569
eval_steps_per_second = 24.424
That’s it!
You have just trained your session-based recommendation model using Transformers4Rec.
Tip: We can easily log and visualize model training and evaluation on Weights & Biases (W&B), Tensorboard and NVIDIA DLLogger. By default, the HuggingFace transformers Trainer (which we extend) uses Weights & Biases (W&B) to log training and evaluation metrics, which provides nice results visualization and comparison between different runs.