# Copyright 2022 NVIDIA Corporation. All Rights Reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# ==============================================================================
# Each user is responsible for checking the content of datasets and the
# applicable licenses and determining if suitable for the intended use.
Session-based recommendation with Transformers4Rec
1. Introduction
In the previous notebook we went through our ETL pipeline with NVTabular library, and created sequential features to be used for training a session-based recommendation model. In this notebook we will learn:
Accelerating data loading of parquet files multiple features on PyTorch using NVTabular library
Training and evaluating an RNN-based (GRU) session-based recommendation model
Training and evaluating a Transformer architecture (XLNET) for session-based recommendation model
Integrate side information (additional features) into transformer architectures in order to improve recommendation accuracy
2. Session-based Recommendation
Session-based recommendation, a sub-area of sequential recommendation, has been an important task in online services like e-commerce and news portals, where most users either browse anonymously or may have very distinct interests for different sessions. Session-Based Recommender Systems (SBRS) have been proposed to model the sequence of interactions within the current user session, where a session is a short sequence of user interactions typically bounded by user inactivity. They have recently gained popularity due to their ability to capture short-term and contextual user preferences towards items.
Many methods have been proposed to leverage the sequence of interactions that occur during a session, including session-based k-NN algorithms like V-SkNN [1] and neural approaches like GRU4Rec [2]. In addition, state of the art NLP approaches have inspired RecSys practitioners and researchers to leverage the self-attention mechanism and the Transformer-based architectures for sequential [3] and session-based recommendation [4].
3. Transformers4Rec Library
In this tutorial, we introduce the Transformers4Rec open-source library for sequential and session-based recommendation task.
With Transformers4Rec we import from the HF Transformers NLP library the transformer architectures and their configuration classes.
In addition, Transformers4Rec provides additional blocks necessary for recommendation, e.g., input features normalization and aggregation, and heads for recommendation and sequence classification/prediction. We also extend their Trainer class to allow for the evaluation with RecSys metrics.
Here are some of the most important modules:
TabularSequenceFeatures is the input block for sequential features. Based on a
Schemaand options set by the user, it dynamically creates all the necessary layers (e.g. embedding layers) to encode, normalize, and aggregate categorical and continuous features. It also allows to set themaskingtraining approach (e.g. Causal LM, Masked LM).TransformerBlock class is the bridge that adapts HuggingFace Transformers for session-based and sequential-based recommendation models.
SequentialBlock allows the definition of a model body as as sequence of layer (similarly to torch.nn.sequential). It is designed to define our model as a sequence of layers and automatically setting the input shape of a layer from the output shape of the previous one.
Head class defines the head of a model.
NextItemPredictionTask is the class to support next item prediction task, combining a model body with a head.
Trainer extends the
Trainerclass from HF transformers and manages the model training and evaluation.
You can check the full documentation of Transformers4Rec if needed.
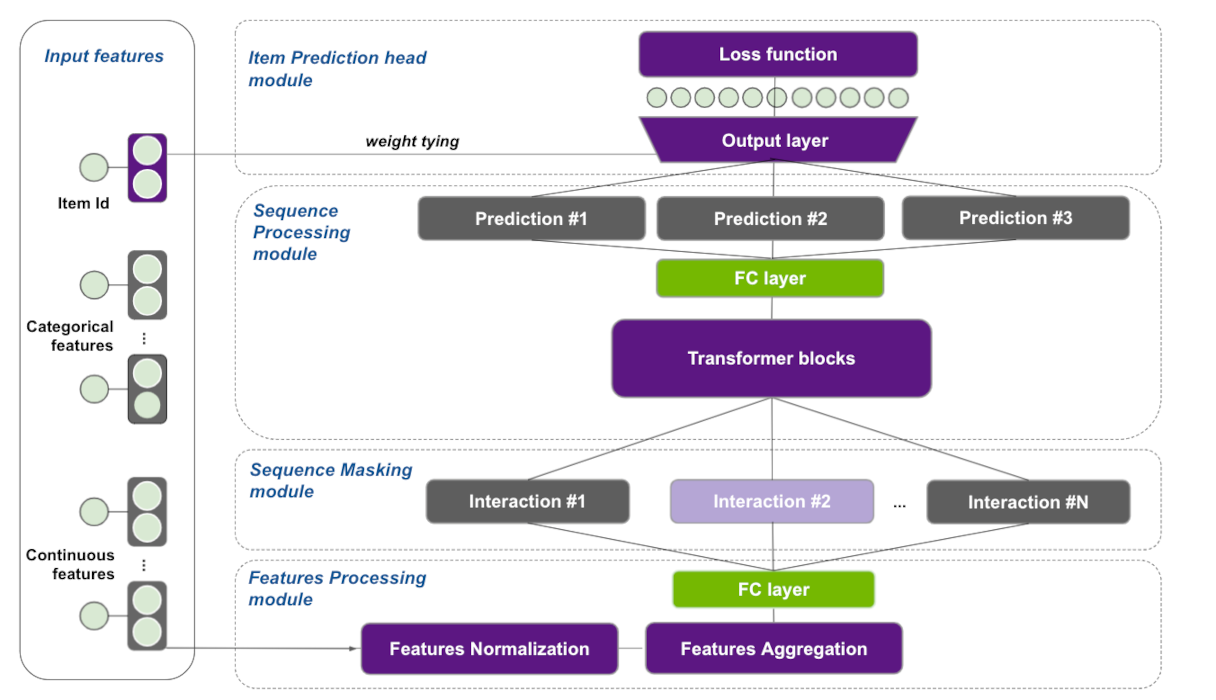
In Figure 1, we present a reference architecture that we are going to build with Transformers4Rec PyTorch API in this notebook. We are going to start using only product-id as input feature, but as you can notice in the figure, we can add additional categorical and numerical features later to improve recommendation accuracy, as shown in Section 3.2.4.
3.1 Training an RNN-based Session-based Recommendation Model
In this section, we use a type of Recurrent Neural Networks (RNN) - the Gated Recurrent Unit (GRU)[5] - to do next-item prediction using a sequence of events (e.g., click, view, or purchase) per user in a given session. There is obviously some sequential patterns that we want to capture to provide more relevant recommendations. In our case, the input of the GRU layer is a representation of the user interaction, the internal GRU hidden state encodes a representation of the session based on past interactions and the outputs are the next-item predictions. Basically, for each item in a given session, we generate the output as the predicted preference of the items, i.e. the likelihood of being the next.
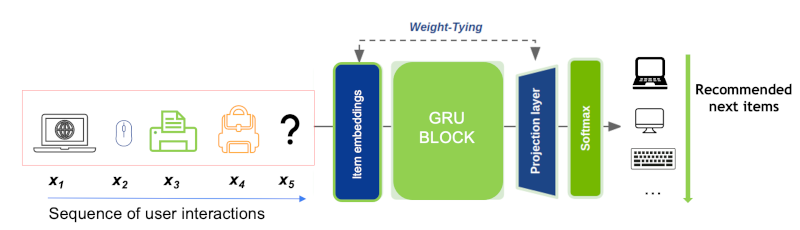
Figure 2 illustrates the logic of predicting next item in a given session. First, the product ids are embedded and fed as a sequence to a GRU layer, which outputs a representation than can be used to predict the next item. For the sake of simplicity, we treat the recommendation as a multi-class classification problem and use cross-entropy loss. In our first example, we use a GRU block instead of Transformer block (shown in the Figure 1).
3.1.1 Import Libraries and Modules
import os
import glob
import torch
import transformers4rec.torch as tr
from transformers4rec.torch.ranking_metric import NDCGAt, RecallAt
from transformers4rec.torch.utils.examples_utils import wipe_memory
/usr/local/lib/python3.8/dist-packages/tqdm/auto.py:21: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from .autonotebook import tqdm as notebook_tqdm
/usr/local/lib/python3.8/dist-packages/merlin/dtypes/mappings/tf.py:52: UserWarning: Tensorflow dtype mappings did not load successfully due to an error: No module named 'tensorflow'
warn(f"Tensorflow dtype mappings did not load successfully due to an error: {exc.msg}")
Instantiates Schema object by reading the save trained parquet file.
from merlin.schema import Schema
from merlin.io import Dataset
INPUT_DATA_DIR = os.environ.get("INPUT_DATA_DIR", "/workspace/data")
train = Dataset(os.path.join(INPUT_DATA_DIR, "processed_nvt/part_0.parquet"))
schema = train.schema
schema = schema.select_by_name(['product_id-list'])
/usr/local/lib/python3.8/dist-packages/merlin/schema/tags.py:149: UserWarning: Compound tags like Tags.ITEM_ID have been deprecated and will be removed in a future version. Please use the atomic versions of these tags, like [<Tags.ITEM: 'item'>, <Tags.ID: 'id'>].
warnings.warn(
Transformers4Rec library relies on Schema object in TabularSequenceFeatures that takes the input features as input and create all the necessary layers to process and aggregate them. As you can see below, the schema.pb is a protobuf text file contains features metadata, including statistics about features such as cardinality, min and max values and also tags based on their characteristics and dtypes (e.g., categorical, continuous, list, item_id). We can tag our target column and even add the prediction task such as binary, regression or multiclass as tags for the target column in the schema.pb file. The Schema provides a standard representation for metadata that is useful when training machine learning or deep learning models.
The metadata information loaded from Schema and their tags are used to automatically set the parameters of Transformers4rec models. Certain Transformers4rec modules have a from_schema() method to instantiate their parameters and layers from protobuf text file respectively.
Although in this tutorial we are defining the Schema manually, the next NVTabular release is going to generate the schema with appropriate types and tags automatically from the preprocessing workflow, allowing the user to set additional feaure tags if needed.
Defining the input block: TabularSequenceFeatures
We define our input block using TabularSequenceFeatures class. The from_schema() method directly parses the schema and accepts sequential and non-sequential features. Based on the Schema and some user-defined options, the categorical features are represented by embeddings and numerical features can be represented as continuous scalars or by a technique named Soft One-Hot embeddings (more info in our paper’s online appendix).
The embedding features can optionally be normalized (layer_norm=True). Data augmentation methods like “Stochastic Swap Noise” (pre="stochastic-swap-noise") and aggregation opptions (like concat and elementwise-sum) are also available. The continuous features can also be combined and projected by MLP layers by setting continuous_projection=[dim]. Finally, the max_sequence_length argument defines the maximum sequence length of our sequential input.
Another important argument is the masking method, which sets the training approach. See Section 3.2.2 for details on this.
sequence_length = 20
inputs = tr.TabularSequenceFeatures.from_schema(
schema,
max_sequence_length= sequence_length,
masking = 'causal',
)
Connecting the blocks with SequentialBlock
The SequentialBlock creates a pipeline by connecting the building blocks in a serial way, so that the input shape of one block is inferred from the output of the previous block. In this example, the TabularSequenceFeatures object is followed by an MLP projection layer, which feeds data to a GRU block.
d_model = 128
body = tr.SequentialBlock(
inputs,
tr.MLPBlock([d_model]),
tr.Block(torch.nn.GRU(input_size=d_model, hidden_size=d_model, num_layers=1), [None, 20, d_model])
)
Item Prediction head and tying embeddings
In our experiments published in our ACM RecSys’21 paper [8], we used the next item prediction head, which projects the output of the RNN/Transformer block to the items space, followed by a softmax layer to produce the relevance scores over all items. For the output layer we provide the Tying Embeddings technique (weight_tying). It was proposed originally by the NLP community to tie the weights of the input (item id) embedding matrix with the output projection layer, showed to be a very effective technique in extensive experimentation for competitions and empirical analysis (for more details see our paper and its online appendix). In practice, such technique helps the network to learn faster item embeddings even for rare items, reduces the number of parameters for large item cardinalities and enables Approximate Nearest Neighbours (ANN) search on inference, as the predictions can be obtained by a dot product between the model output and the item embeddings.
Next, we link the transformer-body to the inputs and the prediction tasks to get the final PyTorch Model class.
head = tr.Head(
body,
tr.NextItemPredictionTask(weight_tying=True,
metrics=[NDCGAt(top_ks=[10, 20], labels_onehot=True),
RecallAt(top_ks=[10, 20], labels_onehot=True)]),
)
model = tr.Model(head)
Projecting inputs of NextItemPredictionTask to'64' As weight tying requires the input dimension '128' to be equal to the item-id embedding dimension '64'
Define a Dataloader function from schema
We use optimized NVTabular PyTorch Dataloader which has the following benefits:
removing bottlenecks from dataloading by processing large chunks of data at a time instead iterating by row
processing datasets that don’t fit within the GPU or CPU memory by streaming from the disk
reading data directly into the GPU memory and removing CPU-GPU communication
preparing batch asynchronously into the GPU to avoid CPU-GPU communication
supporting commonly used formats such as parquet
having native support to sparse sequential features
from transformers4rec.torch.utils.data_utils import MerlinDataLoader
x_cat_names, x_cont_names = ['product_id-list_seq'], []
# dictionary representing max sequence length for column
sparse_features_max = {
fname: sequence_length
for fname in x_cat_names + x_cont_names
}
def get_dataloader(data_path, batch_size=128):
loader = MerlinDataLoader.from_schema(
schema,
data_path,
batch_size,
max_sequence_length=sequence_length,
shuffle=False,
)
return loader
Daily Fine-Tuning: Training over a time window
Now that the model is defined, we are going to launch training. For that, Transfromers4rec extends the HF Transformers Trainer class to adapt the evaluation loop for session-based recommendation task and the calculation of ranking metrics.
The original HF Trainer.train() method is not overloaded, meaning that we leverage the efficient training implementation from HF transformers library, which manages for example half-precision (FP16) training.
Set training arguments
from transformers4rec.config.trainer import T4RecTrainingArguments
from transformers4rec.torch import Trainer
#Set arguments for training
train_args = T4RecTrainingArguments(local_rank = -1,
dataloader_drop_last = False,
report_to = [], #set empty list to avoid logging metrics to Weights&Biases
gradient_accumulation_steps = 1,
per_device_train_batch_size = 256,
per_device_eval_batch_size = 32,
output_dir = "./tmp",
max_sequence_length=sequence_length,
learning_rate=0.00071,
num_train_epochs=3,
logging_steps=200,
)
Instantiate the Trainer
# Instantiate the T4Rec Trainer, which manages training and evaluation
trainer = Trainer(
model=model,
args=train_args,
schema=schema,
compute_metrics=True,
)
Define the output folder of the processed parquet files
OUTPUT_DIR = os.environ.get("OUTPUT_DIR", "/workspace/data/sessions_by_day")
Model finetuning and incremental evaluation
Training models incrementally, e.g. fine-tuning pre-trained models with new data over time is a common practice in industry to scale to the large streaming data been generated every data. Furthermore, it is common to evaluate recommendation models on data that came after the one used to train the models, for a more realistic evaluation.
Here, we use a loop that to conduct a time-based finetuning, by iteratively training and evaluating using a sliding time window as follows: At each iteration, we use training data of a specific time index t to train the model then we evaluate on the validation data of next index t + 1. We set the start time to 1 and end time to 4.
%%time
start_time_window_index = 1
final_time_window_index = 4
for time_index in range(start_time_window_index, final_time_window_index):
# Set data
time_index_train = time_index
time_index_eval = time_index + 1
train_paths = glob.glob(os.path.join(OUTPUT_DIR, f"{time_index_train}/train.parquet"))
eval_paths = glob.glob(os.path.join(OUTPUT_DIR, f"{time_index_eval}/valid.parquet"))
# Initialize dataloaders
trainer.train_dataloader = get_dataloader(train_paths, train_args.per_device_train_batch_size)
trainer.eval_dataloader = get_dataloader(eval_paths, train_args.per_device_eval_batch_size)
# Train on day related to time_index
print('*'*20)
print("Launch training for day %s are:" %time_index)
print('*'*20 + '\n')
trainer.reset_lr_scheduler()
trainer.train()
trainer.state.global_step +=1
# Evaluate on the following day
train_metrics = trainer.evaluate(metric_key_prefix='eval')
print('*'*20)
print("Eval results for day %s are:\t" %time_index_eval)
print('\n' + '*'*20 + '\n')
for key in sorted(train_metrics.keys()):
print(" %s = %s" % (key, str(train_metrics[key])))
wipe_memory()
***** Running training *****
Num examples = 112128
Num Epochs = 3
Instantaneous batch size per device = 256
Total train batch size (w. parallel, distributed & accumulation) = 256
Gradient Accumulation steps = 1
Total optimization steps = 1314
********************
Launch training for day 1 are:
********************
| Step | Training Loss |
|---|---|
| 200 | 9.759100 |
| 400 | 8.757200 |
| 600 | 8.920300 |
| 800 | 8.442900 |
| 1000 | 8.751000 |
| 1200 | 8.367600 |
Saving model checkpoint to ./tmp/checkpoint-500
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Saving model checkpoint to ./tmp/checkpoint-1000
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Training completed. Do not forget to share your model on huggingface.co/models =)
********************
Eval results for day 2 are:
********************
eval_/loss = 8.848333358764648
eval_/next-item/ndcg_at_10 = 0.040753647685050964
eval_/next-item/ndcg_at_20 = 0.049305129796266556
eval_/next-item/recall_at_10 = 0.07925495505332947
eval_/next-item/recall_at_20 = 0.11349068582057953
eval_runtime = 43.1016
eval_samples_per_second = 308.109
eval_steps_per_second = 9.628
***** Running training *****
Num examples = 106240
Num Epochs = 3
Instantaneous batch size per device = 256
Total train batch size (w. parallel, distributed & accumulation) = 256
Gradient Accumulation steps = 1
Total optimization steps = 1245
********************
Launch training for day 2 are:
********************
| Step | Training Loss |
|---|---|
| 200 | 8.940700 |
| 400 | 8.468400 |
| 600 | 8.670800 |
| 800 | 8.197200 |
| 1000 | 8.498300 |
| 1200 | 8.065300 |
Saving model checkpoint to ./tmp/checkpoint-500
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Saving model checkpoint to ./tmp/checkpoint-1000
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Training completed. Do not forget to share your model on huggingface.co/models =)
********************
Eval results for day 3 are:
********************
eval_/loss = 8.614578247070312
eval_/next-item/ndcg_at_10 = 0.05164230614900589
eval_/next-item/ndcg_at_20 = 0.0637783482670784
eval_/next-item/recall_at_10 = 0.09867884963750839
eval_/next-item/recall_at_20 = 0.1468765288591385
eval_runtime = 35.8932
eval_samples_per_second = 342.349
eval_steps_per_second = 10.698
***** Running training *****
Num examples = 97792
Num Epochs = 3
Instantaneous batch size per device = 256
Total train batch size (w. parallel, distributed & accumulation) = 256
Gradient Accumulation steps = 1
Total optimization steps = 1146
********************
Launch training for day 3 are:
********************
| Step | Training Loss |
|---|---|
| 200 | 8.620800 |
| 400 | 8.233000 |
| 600 | 8.173500 |
| 800 | 7.982100 |
| 1000 | 7.933700 |
Saving model checkpoint to ./tmp/checkpoint-500
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Saving model checkpoint to ./tmp/checkpoint-1000
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Training completed. Do not forget to share your model on huggingface.co/models =)
********************
Eval results for day 4 are:
********************
eval_/loss = 8.204485893249512
eval_/next-item/ndcg_at_10 = 0.06745054572820663
eval_/next-item/ndcg_at_20 = 0.08173713833093643
eval_/next-item/recall_at_10 = 0.12599845230579376
eval_/next-item/recall_at_20 = 0.18262046575546265
eval_runtime = 60.7599
eval_samples_per_second = 255.958
eval_steps_per_second = 7.999
CPU times: user 2min 52s, sys: 1min 5s, total: 3min 57s
Wall time: 4min 55s
Let’s write out model evaluation accuracy results to a text file to compare model at the end
with open("results.txt", 'w') as f:
f.write('GRU accuracy results:')
f.write('\n')
for key, value in model.compute_metrics().items():
f.write('%s:%s\n' % (key, value.item()))
Metrics
We have extended the HuggingFace transformers Trainer class (PyTorch only) to support evaluation of RecSys metrics. The following information
retrieval metrics are used to compute the Top-20 accuracy of recommendation lists containing all items:
Normalized Discounted Cumulative Gain (NDCG@20): NDCG accounts for rank of the relevant item in the recommendation list and is a more fine-grained metric than HR, which only verifies whether the relevant item is among the top-k items.
Hit Rate (HR@20): Also known as
Recall@nwhen there is only one relevant item in the recommendation list. HR just verifies whether the relevant item is among the top-n items.
Restart the kernel to free our GPU memory
import IPython
app = IPython.Application.instance()
app.kernel.do_shutdown(True)
{'status': 'ok', 'restart': True}
At this stage if the kernel does not restart automatically, we expect you to manually restart the kernel to free GPU memory so that you can move on to the next session-based model training with a SOTA deep learning Transformer-based model, XLNet.
3.2. Training a Transformer-based Session-based Recommendation Model
3.2.1 What’s Transformers?
The Transformer is a competitive alternative to the models using Recurrent Neural Networks (RNNs) for a range of sequence modeling tasks. The Transformer architecture [6] was introduced as a novel architecture in NLP domain that aims to solve sequence-to-sequence tasks relying entirely on self-attention mechanism to compute representations of its input and output. Hence, the Transformer overperforms RNNs with their three mechanisms:
Non-sequential: Transformers network is parallelized where as RNN computations are inherently sequential. That resulted in significant speed-up in the training time.
Self-attention mechanisms: Transformers rely entirely on self-attention mechanisms that directly model relationships between all item-ids in a sequence.
Positional encodings: A representation of the location or “position” of items in a sequence which is used to give the order context to the model architecture.
![]()
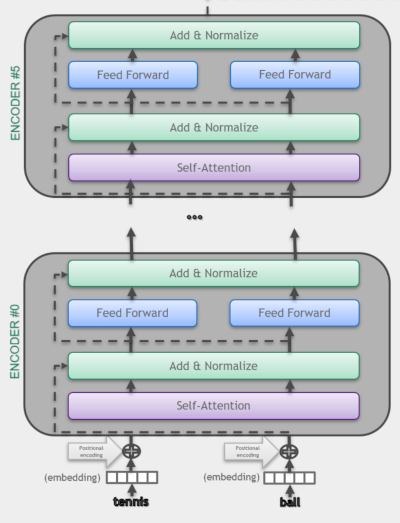
Figure 4 illustrates the differences of Transformer (self-attention based) and a vanilla RNN architecture. As we see, RNN cannot be parallelized because it uses sequential processing over time (notice the sequential path from previous cells to the current one). On the other hand, the Transformer is a more powerful architecture because the self-attention mechanism is capable of representing dependencies within the sequence of tokens, favors parallel processing and handle longer sequences.
As illustrated in the Attention is All You Need paper, the original transformer model is made up of an encoder and decoder where each is a stack we can call a transformer block. In Transformers4Rec architectures we use the encoder block of transformer architecture.
3.2.2. XLNet
Here, we use XLNet [10] as the Transformer block in our architecture. It was originally proposed to be trained with the Permutation Language Modeling (PLM) technique, that combines the advantages of autoregressive (Causal LM) and autoencoding (Masked LM). Although, we found out in our paper [8] that the Masked Language Model (MLM) approach worked better than PLM for the small sequences in session-based recommendation, thus we use MLM for this example. MLM was introduced in BERT: Pre-training of Deep Bidirectional Transformers for Language Understanding paper [8].
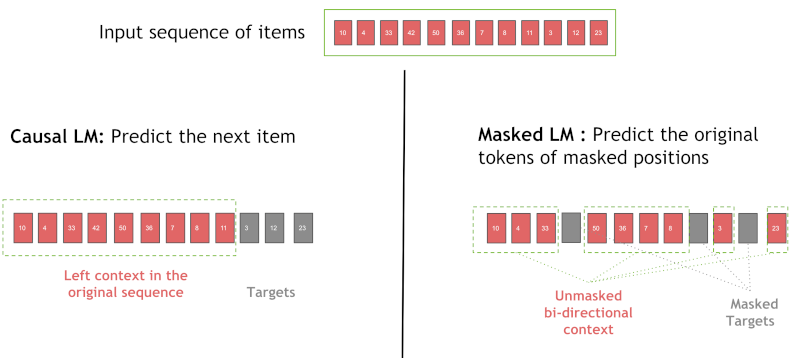
Figure 5 illustrates the causal language modeling (LM) and masked LM. In this example, we use in causal LM for RNN masked LM for XLNet. Causal LM is the task of predicting the token following a sequence of tokens, where the model only attends to the left context, i.e. models the probability of a token given the previous tokens in a sentence [7]. On the other hand, the MLM randomly masks some of the tokens from the input sequence, and the objective is to predict the original vocabulary id of the masked word based only on its bi-directional context. When we train with MLM, the Transformer layer is also allowed to use positions on the right (future information) during training. During inference, all past items are visible for the Transformer layer, which tries to predict the next item. It performs a type of data augmentation, by masking different positions of the sequences in each training epoch.
3.2.3 Train XLNET for Next Item Prediction
Now we are going to define an architecture for next-item prediction using the XLNET architecture.
import os
import glob
import torch
import transformers4rec.torch as tr
from transformers4rec.torch.ranking_metric import NDCGAt, RecallAt
from transformers4rec.torch.utils.examples_utils import wipe_memory
/usr/local/lib/python3.8/dist-packages/tqdm/auto.py:21: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from .autonotebook import tqdm as notebook_tqdm
/usr/local/lib/python3.8/dist-packages/merlin/dtypes/mappings/tf.py:52: UserWarning: Tensorflow dtype mappings did not load successfully due to an error: No module named 'tensorflow'
warn(f"Tensorflow dtype mappings did not load successfully due to an error: {exc.msg}")
As we did above, we start with defining our schema object and selecting only the product_id feature for training.
from merlin.schema import Schema
from merlin.io import Dataset
INPUT_DATA_DIR = os.environ.get("INPUT_DATA_DIR", "/workspace/data")
train = Dataset(os.path.join(INPUT_DATA_DIR, "processed_nvt/part_0.parquet"))
schema = train.schema
schema = schema.select_by_name(['product_id-list'])
/usr/local/lib/python3.8/dist-packages/merlin/schema/tags.py:149: UserWarning: Compound tags like Tags.ITEM_ID have been deprecated and will be removed in a future version. Please use the atomic versions of these tags, like [<Tags.ITEM: 'item'>, <Tags.ID: 'id'>].
warnings.warn(
Define Input block
Here we instantiate TabularSequenceFeatures from the feature schema and set masking="mlm" to use MLM as training method.
#Input
sequence_length, d_model = 20, 192
# Define input module to process tabular input-features and to prepare masked inputs
inputs= tr.TabularSequenceFeatures.from_schema(
schema,
max_sequence_length=sequence_length,
d_output=d_model,
masking="mlm",
)
We have inherited the original XLNetConfig class of HF transformers with some default arguments in the build() method. Here we use it to instantiate an XLNET model according to the arguments (d_model, n_head, etc.), defining the model architecture.
The TransformerBlock class supports HF Transformers for session-based and sequential-based recommendation models. NextItemPredictionTask is the class to support next item prediction task, encapsulating the corresponding heads and loss.
# Define XLNetConfig class and set default parameters for HF XLNet config
transformer_config = tr.XLNetConfig.build(
d_model=d_model, n_head=4, n_layer=2, total_seq_length=sequence_length
)
# Define the model block including: inputs, masking, projection and transformer block.
body = tr.SequentialBlock(
inputs, tr.MLPBlock([192]), tr.TransformerBlock(transformer_config, masking=inputs.masking)
)
# Define the head for to next item prediction task
head = tr.Head(
body,
tr.NextItemPredictionTask(weight_tying=True,
metrics=[NDCGAt(top_ks=[10, 20], labels_onehot=True),
RecallAt(top_ks=[10, 20], labels_onehot=True)]),
)
# Get the end-to-end Model class
model = tr.Model(head)
Projecting inputs of NextItemPredictionTask to'64' As weight tying requires the input dimension '192' to be equal to the item-id embedding dimension '64'
Set training arguments
Among the training arguments you can set the data_loader_engine to automatically instantiate the dataloader based on the schema, rather than instantiating the data loader manually like we did for the RNN example. The default value is "merlin" for optimized GPU-based data-loading. Optionally the PyarrowDataLoader ("pyarrow") can also be used as a basic option, but it is slower and works only for small datasets, as the full data is loaded into CPU memory.
from transformers4rec.config.trainer import T4RecTrainingArguments
from transformers4rec.torch import Trainer
#Set arguments for training
training_args = T4RecTrainingArguments(
output_dir="./tmp",
max_sequence_length=20,
data_loader_engine='merlin',
num_train_epochs=3,
dataloader_drop_last=False,
per_device_train_batch_size = 256,
per_device_eval_batch_size = 32,
gradient_accumulation_steps = 1,
learning_rate=0.000666,
report_to = [],
logging_steps=200,
)
Instantiate the trainer
# Instantiate the T4Rec Trainer, which manages training and evaluation
trainer = Trainer(
model=model,
args=training_args,
schema=schema,
compute_metrics=True,
)
Define the output folder of the processed parquet files
OUTPUT_DIR = os.environ.get("OUTPUT_DIR", "/workspace/data/sessions_by_day")
Now, we do time-based fine-tuning the model by iteratively training and evaluating using a sliding time window, like we did for the RNN example.
%%time
start_time_window_index = 1
final_time_window_index = 4
for time_index in range(start_time_window_index, final_time_window_index):
# Set data
time_index_train = time_index
time_index_eval = time_index + 1
train_paths = glob.glob(os.path.join(OUTPUT_DIR, f"{time_index_train}/train.parquet"))
eval_paths = glob.glob(os.path.join(OUTPUT_DIR, f"{time_index_eval}/valid.parquet"))
# Train on day related to time_index
print('*'*20)
print("Launch training for day %s are:" %time_index)
print('*'*20 + '\n')
trainer.train_dataset_or_path = train_paths
trainer.reset_lr_scheduler()
trainer.train()
trainer.state.global_step +=1
# Evaluate on the following day
trainer.eval_dataset_or_path = eval_paths
train_metrics = trainer.evaluate(metric_key_prefix='eval')
print('*'*20)
print("Eval results for day %s are:\t" %time_index_eval)
print('\n' + '*'*20 + '\n')
for key in sorted(train_metrics.keys()):
print(" %s = %s" % (key, str(train_metrics[key])))
wipe_memory()
********************
Launch training for day 1 are:
********************
***** Running training *****
Num examples = 112128
Num Epochs = 3
Instantaneous batch size per device = 256
Total train batch size (w. parallel, distributed & accumulation) = 256
Gradient Accumulation steps = 1
Total optimization steps = 1314
| Step | Training Loss |
|---|---|
| 200 | 9.978000 |
| 400 | 9.067800 |
| 600 | 8.780000 |
| 800 | 8.656200 |
| 1000 | 8.566800 |
| 1200 | 8.511600 |
Saving model checkpoint to ./tmp/checkpoint-500
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Saving model checkpoint to ./tmp/checkpoint-1000
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Training completed. Do not forget to share your model on huggingface.co/models =)
***** Running training *****
Num examples = 106240
Num Epochs = 3
Instantaneous batch size per device = 256
Total train batch size (w. parallel, distributed & accumulation) = 256
Gradient Accumulation steps = 1
Total optimization steps = 1245
********************
Eval results for day 2 are:
********************
eval_/loss = 8.715866088867188
eval_/next-item/ndcg_at_10 = 0.050047338008880615
eval_/next-item/ndcg_at_20 = 0.06090249866247177
eval_/next-item/recall_at_10 = 0.09584496170282364
eval_/next-item/recall_at_20 = 0.13875272870063782
eval_runtime = 45.3102
eval_samples_per_second = 293.091
eval_steps_per_second = 9.159
********************
Launch training for day 2 are:
********************
| Step | Training Loss |
|---|---|
| 200 | 8.646500 |
| 400 | 8.534100 |
| 600 | 8.395500 |
| 800 | 8.349400 |
| 1000 | 8.259200 |
| 1200 | 8.222200 |
Saving model checkpoint to ./tmp/checkpoint-500
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Saving model checkpoint to ./tmp/checkpoint-1000
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Training completed. Do not forget to share your model on huggingface.co/models =)
********************
Eval results for day 3 are:
********************
eval_/loss = 8.42210865020752
eval_/next-item/ndcg_at_10 = 0.06027791276574135
eval_/next-item/ndcg_at_20 = 0.07407757639884949
eval_/next-item/recall_at_10 = 0.1122981607913971
eval_/next-item/recall_at_20 = 0.16726472973823547
eval_runtime = 39.0537
eval_samples_per_second = 314.643
eval_steps_per_second = 9.833
********************
Launch training for day 3 are:
********************
***** Running training *****
Num examples = 97792
Num Epochs = 3
Instantaneous batch size per device = 256
Total train batch size (w. parallel, distributed & accumulation) = 256
Gradient Accumulation steps = 1
Total optimization steps = 1146
| Step | Training Loss |
|---|---|
| 200 | 8.325100 |
| 400 | 8.238700 |
| 600 | 8.108700 |
| 800 | 8.037000 |
| 1000 | 7.972000 |
Saving model checkpoint to ./tmp/checkpoint-500
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Saving model checkpoint to ./tmp/checkpoint-1000
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Training completed. Do not forget to share your model on huggingface.co/models =)
********************
Eval results for day 4 are:
********************
eval_/loss = 8.08250617980957
eval_/next-item/ndcg_at_10 = 0.0742299035191536
eval_/next-item/ndcg_at_20 = 0.09017771482467651
eval_/next-item/recall_at_10 = 0.14068539440631866
eval_/next-item/recall_at_20 = 0.20387786626815796
eval_runtime = 63.4715
eval_samples_per_second = 245.023
eval_steps_per_second = 7.657
CPU times: user 11min 29s, sys: 51.9 s, total: 12min 21s
Wall time: 4min 59s
Add eval accuracy metric results to the existing resuls.txt file.
with open("results.txt", 'a') as f:
f.write('\n')
f.write('XLNet-MLM accuracy results:')
f.write('\n')
for key, value in model.compute_metrics().items():
f.write('%s:%s\n' % (key, value.item()))
Restart the kernel to free our GPU memory
import IPython
app = IPython.Application.instance()
app.kernel.do_shutdown(True)
{'status': 'ok', 'restart': True}
At this stage if the kernel does not restart automatically, we expect you to manually restart the kernel to free GPU memory so that you can move on to the next session-based model training with XLNet using side information.
3.2.4 Train XLNET with Side Information for Next Item Prediction
It is a common practice in RecSys to leverage additional tabular features of item (product) metadata and user context, providing the model more
information for meaningful predictions. With that motivation, in this section, we will use additional features to train our XLNET architecture. We already checked our schema.pb, saw that it includes features and their tags. Now it is time to use these additional features that we created in the 02_ETL-with-NVTabular.ipynb notebook.
import os
import glob
import nvtabular as nvt
import torch
import transformers4rec.torch as tr
from transformers4rec.torch.ranking_metric import NDCGAt, RecallAt
/usr/local/lib/python3.8/dist-packages/tqdm/auto.py:21: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from .autonotebook import tqdm as notebook_tqdm
/usr/local/lib/python3.8/dist-packages/merlin/dtypes/mappings/tf.py:52: UserWarning: Tensorflow dtype mappings did not load successfully due to an error: No module named 'tensorflow'
warn(f"Tensorflow dtype mappings did not load successfully due to an error: {exc.msg}")
from merlin.schema import Schema
from merlin.io import Dataset
# Define categorical and continuous columns to fed to training model
x_cat_names = ['product_id-list', 'category_id-list', 'brand-list']
x_cont_names = ['product_recency_days_log_norm-list', 'et_dayofweek_sin-list', 'et_dayofweek_cos-list',
'price_log_norm-list', 'relative_price_to_avg_categ_id-list']
INPUT_DATA_DIR = os.environ.get("INPUT_DATA_DIR", "/workspace/data")
train = Dataset(os.path.join(INPUT_DATA_DIR, "processed_nvt/part_0.parquet"))
schema = train.schema
schema = schema.select_by_name(x_cat_names + x_cont_names)
/usr/local/lib/python3.8/dist-packages/merlin/schema/tags.py:149: UserWarning: Compound tags like Tags.ITEM_ID have been deprecated and will be removed in a future version. Please use the atomic versions of these tags, like [<Tags.ITEM: 'item'>, <Tags.ID: 'id'>].
warnings.warn(
Here we set aggregation="concat", so that all categorical and continuous features are concatenated to form an interaction representation.
# Define input block
sequence_length, d_model = 20, 192
# Define input module to process tabular input-features and to prepare masked inputs
inputs= tr.TabularSequenceFeatures.from_schema(
schema,
max_sequence_length=sequence_length,
aggregation="concat",
d_output=d_model,
masking="mlm",
)
# Define XLNetConfig class and set default parameters for HF XLNet config
transformer_config = tr.XLNetConfig.build(
d_model=d_model, n_head=4, n_layer=2, total_seq_length=sequence_length
)
# Define the model block including: inputs, masking, projection and transformer block.
body = tr.SequentialBlock(
inputs, tr.MLPBlock([192]), tr.TransformerBlock(transformer_config, masking=inputs.masking)
)
# Define the head related to next item prediction task
head = tr.Head(
body,
tr.NextItemPredictionTask(weight_tying=True,
metrics=[NDCGAt(top_ks=[10, 20], labels_onehot=True),
RecallAt(top_ks=[10, 20], labels_onehot=True)]),
)
# Get the end-to-end Model class
model = tr.Model(head)
Projecting inputs of NextItemPredictionTask to'64' As weight tying requires the input dimension '192' to be equal to the item-id embedding dimension '64'
Training and Evaluation
from transformers4rec.config.trainer import T4RecTrainingArguments
from transformers4rec.torch import Trainer
from transformers4rec.torch.utils.examples_utils import wipe_memory
#Set arguments for training
training_args = T4RecTrainingArguments(
output_dir="./tmp",
max_sequence_length=20,
data_loader_engine='merlin',
num_train_epochs=3,
dataloader_drop_last=False,
per_device_train_batch_size = 256,
per_device_eval_batch_size = 32,
gradient_accumulation_steps = 1,
learning_rate=0.000666,
report_to = [],
logging_steps=200,
)
# Instantiate the T4Rec Trainer, which manages training and evaluation
trainer = Trainer(
model=model,
args=training_args,
schema=schema,
compute_metrics=True,
)
Define the output folder of the processed parquet files
OUTPUT_DIR = os.environ.get("OUTPUT_DIR", "/workspace/data/sessions_by_day")
%%time
start_time_window_index = 1
final_time_window_index = 4
for time_index in range(start_time_window_index, final_time_window_index):
# Set data
time_index_train = time_index
time_index_eval = time_index + 1
train_paths = glob.glob(os.path.join(OUTPUT_DIR, f"{time_index_train}/train.parquet"))
eval_paths = glob.glob(os.path.join(OUTPUT_DIR, f"{time_index_eval}/valid.parquet"))
# Train on day related to time_index
print('*'*20)
print("Launch training for day %s are:" %time_index)
print('*'*20 + '\n')
trainer.train_dataset_or_path = train_paths
trainer.reset_lr_scheduler()
trainer.train()
trainer.state.global_step +=1
# Evaluate on the following day
trainer.eval_dataset_or_path = eval_paths
train_metrics = trainer.evaluate(metric_key_prefix='eval')
print('*'*20)
print("Eval results for day %s are:\t" %time_index_eval)
print('\n' + '*'*20 + '\n')
for key in sorted(train_metrics.keys()):
print(" %s = %s" % (key, str(train_metrics[key])))
wipe_memory()
********************
Launch training for day 1 are:
********************
***** Running training *****
Num examples = 112128
Num Epochs = 3
Instantaneous batch size per device = 256
Total train batch size (w. parallel, distributed & accumulation) = 256
Gradient Accumulation steps = 1
Total optimization steps = 1314
| Step | Training Loss |
|---|---|
| 200 | 9.823300 |
| 400 | 8.907700 |
| 600 | 8.615000 |
| 800 | 8.508400 |
| 1000 | 8.392100 |
| 1200 | 8.309200 |
Saving model checkpoint to ./tmp/checkpoint-500
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Saving model checkpoint to ./tmp/checkpoint-1000
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Training completed. Do not forget to share your model on huggingface.co/models =)
***** Running training *****
Num examples = 106240
Num Epochs = 3
Instantaneous batch size per device = 256
Total train batch size (w. parallel, distributed & accumulation) = 256
Gradient Accumulation steps = 1
Total optimization steps = 1245
********************
Eval results for day 2 are:
********************
eval_/loss = 8.507274627685547
eval_/next-item/ndcg_at_10 = 0.059581220149993896
eval_/next-item/ndcg_at_20 = 0.07178892195224762
eval_/next-item/recall_at_10 = 0.10866450518369675
eval_/next-item/recall_at_20 = 0.15722796320915222
eval_runtime = 48.7391
eval_samples_per_second = 272.471
eval_steps_per_second = 8.515
********************
Launch training for day 2 are:
********************
| Step | Training Loss |
|---|---|
| 200 | 8.442700 |
| 400 | 8.282900 |
| 600 | 8.154300 |
| 800 | 8.022300 |
| 1000 | 7.951400 |
| 1200 | 7.864900 |
Saving model checkpoint to ./tmp/checkpoint-500
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Saving model checkpoint to ./tmp/checkpoint-1000
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Training completed. Do not forget to share your model on huggingface.co/models =)
********************
Eval results for day 3 are:
********************
eval_/loss = 8.165782928466797
eval_/next-item/ndcg_at_10 = 0.07608938217163086
eval_/next-item/ndcg_at_20 = 0.09094516187906265
eval_/next-item/recall_at_10 = 0.14394062757492065
eval_/next-item/recall_at_20 = 0.2028217315673828
eval_runtime = 41.5671
eval_samples_per_second = 295.618
eval_steps_per_second = 9.238
********************
Launch training for day 3 are:
********************
***** Running training *****
Num examples = 97792
Num Epochs = 3
Instantaneous batch size per device = 256
Total train batch size (w. parallel, distributed & accumulation) = 256
Gradient Accumulation steps = 1
Total optimization steps = 1146
| Step | Training Loss |
|---|---|
| 200 | 8.026600 |
| 400 | 7.860000 |
| 600 | 7.709400 |
| 800 | 7.622100 |
| 1000 | 7.549700 |
Saving model checkpoint to ./tmp/checkpoint-500
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Saving model checkpoint to ./tmp/checkpoint-1000
Trainer.model is not a `PreTrainedModel`, only saving its state dict.
Training completed. Do not forget to share your model on huggingface.co/models =)
********************
Eval results for day 4 are:
********************
eval_/loss = 7.7548112869262695
eval_/next-item/ndcg_at_10 = 0.09143278002738953
eval_/next-item/ndcg_at_20 = 0.10998427122831345
eval_/next-item/recall_at_10 = 0.17630764842033386
eval_/next-item/recall_at_20 = 0.249935582280159
eval_runtime = 66.6057
eval_samples_per_second = 233.494
eval_steps_per_second = 7.297
CPU times: user 16min 50s, sys: 1min 6s, total: 17min 57s
Wall time: 8min 42s
Add XLNet-MLM with side information accuracy results to the results.txt
with open("results.txt", 'a') as f:
f.write('\n')
f.write('XLNet-MLM with side information accuracy results:')
f.write('\n')
for key, value in model.compute_metrics().items():
f.write('%s:%s\n' % (key, value.item()))
!cat results.txt
GRU accuracy results:
next-item/ndcg_at_10:0.06745054572820663
next-item/ndcg_at_20:0.08173713833093643
next-item/recall_at_10:0.12599845230579376
next-item/recall_at_20:0.18262046575546265
XLNet-MLM accuracy results:
next-item/ndcg_at_10:0.0742299035191536
next-item/ndcg_at_20:0.09017771482467651
next-item/recall_at_10:0.14068539440631866
next-item/recall_at_20:0.20387786626815796
XLNet-MLM with side information accuracy results:
next-item/ndcg_at_10:0.08309739083051682
next-item/ndcg_at_20:0.10099391639232635
next-item/recall_at_10:0.1542772501707077
next-item/recall_at_20:0.22519969940185547
In the end, using side information provided higher accuracy. Why is that? Have an idea?
Wrap Up
Congratulations on finishing this notebook. In this tutorial, we have presented Transformers4Rec, an open source library designed to enable RecSys researchers and practitioners to quickly and easily explore the latest developments of the NLP for sequential and session-based recommendation tasks.
References
[1] Malte Ludewig and Dietmar Jannach. 2018. Evaluation of session-based recommendation algorithms. User Modeling and User-Adapted Interaction 28, 4-5 (2018), 331–390.
[2] Balázs Hidasi and Alexandros Karatzoglou. 2018. Recurrent neural networks with top-k gains for session-based recommendations. In Proceedings of the 27th ACMinternational conference on information and knowledge management. 843–852.
[3] Fei Sun, Jun Liu, Jian Wu, Changhua Pei, Xiao Lin, Wenwu Ou, and Peng Jiang. 2019. BERT4Rec: Sequential recommendation with bidirectional encoder representations from transformer. In Proceedings of the 28th ACM international conference on information and knowledge management. 1441–1450.
[4] Shiming Sun, Yuanhe Tang, Zemei Dai, and Fu Zhou. 2019. Self-attention network for session-based recommendation with streaming data input. IEEE Access 7 (2019), 110499–110509.
[5] Kyunghyun Cho, Bart Van Merriënboer, Caglar Gulcehre, Dzmitry Bahdanau, Fethi Bougares, Holger Schwenk, and Yoshua Bengio. 2014. Learning phrase representations using RNN encoder-decoder for statistical machine translation. arXiv preprint arXiv:1406.1078 (2014).
[6] Vaswani, A., et al. (2017). Attention is all you need. In Advances in neural information processing systems (pp. 5998-6008).
[7] Lample, Guillaume, and Alexis Conneau. “Cross-lingual language model pretraining.” arXiv preprint arXiv:1901.07291
[8] Gabriel De Souza P. Moreira, et al. (2021). Transformers4Rec: Bridging the Gap between NLP and Sequential / Session-Based Recommendation. RecSys’21.
[9] Understanding XLNet, BorealisAI. Online available: https://www.borealisai.com/en/blog/understanding-xlnet/
[10] Yang, Zhilin, et al. “Xlnet: Generalized autoregressive pretraining for language understanding.” Advances in neural information processing systems 32 (2019).